Sorry for the long delay between posts. Being a hobby project usually this takes low priority when other things are urgent. And actually, there have been many advances lately but I haven’t had the chance to post them. Lets go through these in order.
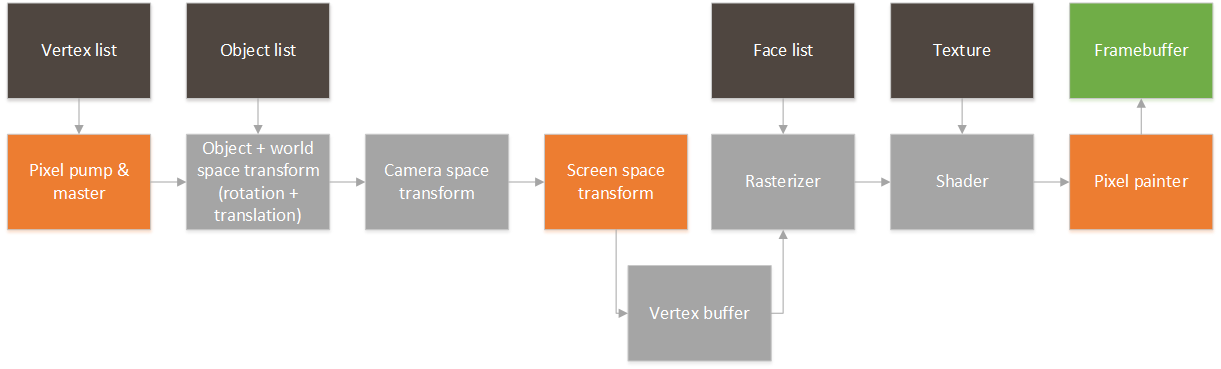
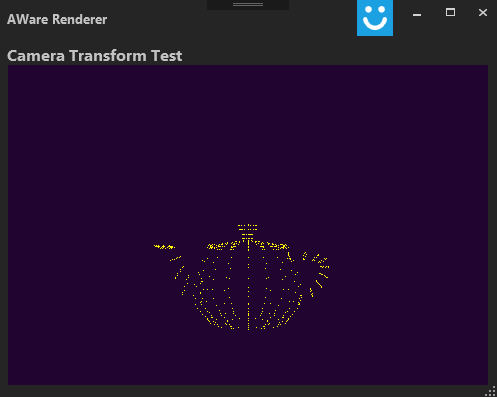
Although we have a fair point cloud rendering in place it really is not that useful unless we can move and rotate objects. For that purpose we have the object transform block highlighted below in red:
![]()
The idea is that we can have a list of object specific parameters in a BRAM that the block will use to alter the vertex stream:
- number of vertices in the object
- position
- rotation
The block will take in vertices from the vertex pump, rotate them around the object’s axis and then add the object’s position as an offset to each vertex. The position part is actually quite simple since we only have to do an addition on each axis. The rotation part, well… no so much.